
Arduino Micro Based Wireless RC Transmitter
What Is an RC Transmitter?
RC stands for Remote Control and is commonly used in applications where a transmitter and receiver communicate wirelessly to control a device. An RC transmitter is used to send control signals—such as movement, direction, or speed—to a receiver, which then acts according to those commands. RC transmitters are widely used in RC cars, drones, boats, robotics projects, and DIY electronics applications.
What Is a Transmitter?
A transmitter is an electronic device that generates and sends radio frequency (RF) signals through an antenna. These signals travel wirelessly and are received by a compatible radio receiver tuned to the same frequency. The primary purpose of a transmitter is to enable long-distance, wireless communication between devices without physical connections.
What Is Arduino Micro?
The Arduino Micro is a compact and powerful microcontroller board based on the ATmega32u4, developed in collaboration with Adafruit. It is well-suited for projects that require USB communication, compact size, and multiple input/output options—making it ideal for building RC transmitters and handheld controllers.
The board features 20 digital input/output pins, out of which 7 support PWM output and 12 can be used as analog inputs. It also includes a 16 MHz crystal oscillator, micro USB connector, ICSP header, and a reset button for easy programming and debugging.
Key Features of Arduino Micro
- ATmega32u4 Microcontroller
- 2.5 KB SRAM
- Supported Input Voltage: 4V–12V DC
- Communication Interfaces:
- 1× UART
- 1× I2C
- 1× SPI
- 7× PWM Channels
- Native USB support
Hardware Requirements for RC Transmitter Project
To build an Arduino Micro–based RC Transmitter, you will need the following components:
- Arduino Micro
- nRF24L01+ PA + LNA Module with Adapter Board
- SSD1306 OLED Display (0.96 inch)
- SSD1306 OLED Display (0.91 inch)
- MPU6050 Gyroscope & Accelerometer
- Toggle Switches
- Rocker Switch
- Slide Potentiometer
- 10k Potentiometer with Knob
- Joystick Module
- Prototype Board
- Male and Female Header Pins
- Jumper Wires
- 9V Battery with Battery Cap
- 3D Printed Housing
Software Requirements
- Arduino IDE – used for writing, compiling, and uploading code to the Arduino Micro.
Circuit Diagram and Hardware Interfacing –
Circuit Diagram-
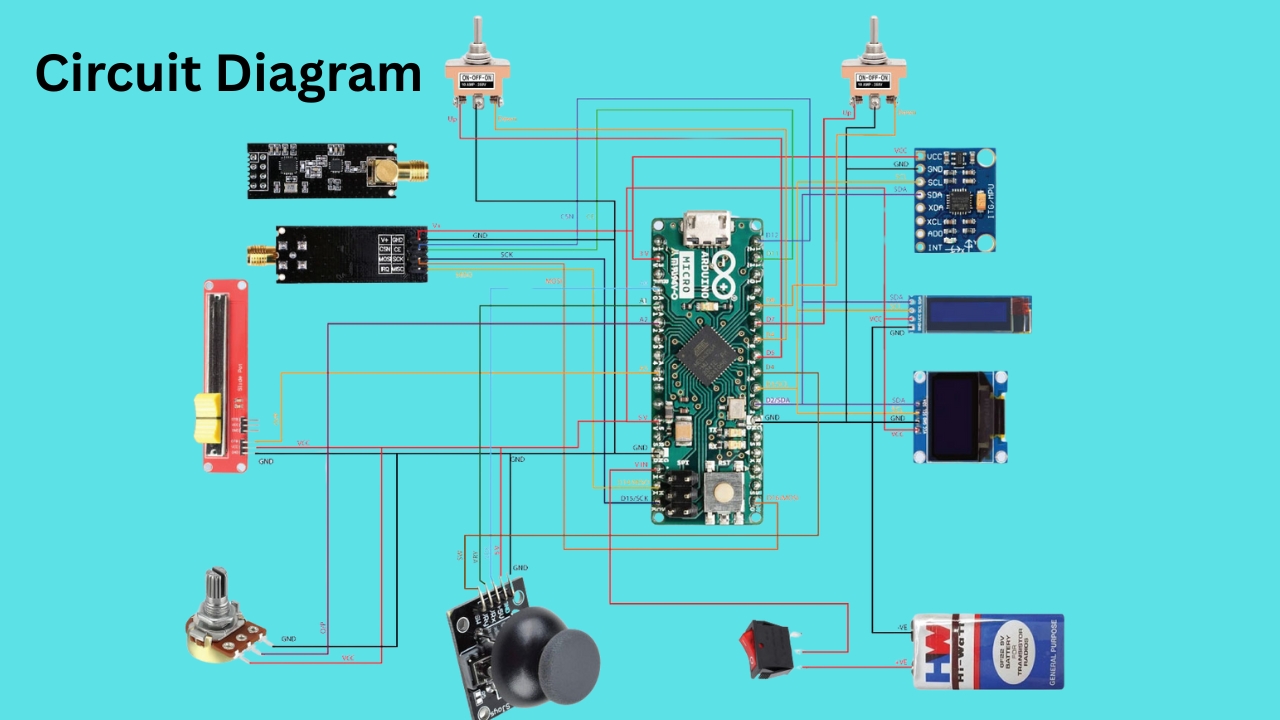
Hardware Interfacing –
Arduino Micro
| Arduino Micro | NRF24L01 |
|---|---|
| 11 | CE |
| 12 | CSN |
| SCK | SCK |
| MISO | MISO |
| MOSI | MOSI |
| Arduino Micro | MPU6050 |
|---|---|
| 2 | SDA |
| 3 | SCL |
| Arduino Micro | SSD1306 Display |
|---|---|
| 2 | SDA |
| 3 | SCL |
| Arduino Micro | SSD1306 Display 2 |
|---|---|
| 2 | SDA |
| 3 | SCL |
| Arduino Micro | Toggle Switches |
|---|---|
| 5 | SW 1 UP |
| 6 | SW 1 DOWN |
| 7 | SW 2 UP |
| 8 | SW 2 DOWN |
| Arduino Micro | Joystick |
|---|---|
| A0 | JS X |
| A1 | JS Y |
| 4 | JS Switch |
| Arduino Micro | Potentiometers |
|---|---|
| A2 | Pot 1 Output |
| A5 | Slide Pot Output |
Coding –
Though, I’ve fitted this remote with manual and gyro options for controlling. But is up to the coding on how to utilize the available resources and plan on which functions to do what.
#include <SPI.h>
#include <Wire.h>
#include <nRF24L01.h>
#include <RF24.h>
#include <Adafruit_GFX.h>
#include <Adafruit_MPU6050.h>
#include <Adafruit_SSD1306.h>
#include <Adafruit_Sensor.h>
Adafruit_SSD1306 disp1(-1);
Adafruit_SSD1306 disp2(-1);
Adafruit_MPU6050 mpu;
RF24 radio(11, 12); // CE, CSN
const byte addresses[][6] = {“00001”, “00002”};
struct pack{
int spot=0, x=0, y=0, jsw=1, trim=0;
};
struct drone{
int batt;
};
pack data;
drone stat;
void setup() {
Serial.begin(9600);
//Wire.setClock(400000);
pinMode(5, INPUT_PULLUP); //SW 1 L
pinMode(6, INPUT_PULLUP); //SW 1 H
pinMode(7, INPUT_PULLUP); //SW 2 L
pinMode(8, INPUT_PULLUP); //SW 2 H
pinMode(A0, INPUT); //JY X
pinMode(A1, INPUT); //JY Y
pinMode(4, INPUT_PULLUP); //JY SW
pinMode(A2, INPUT); //POT OUT
pinMode(A5, INPUT); //SPOT OUT
radio.begin();
radio.setRetries(15, 15);
radio.openWritingPipe(addresses[1]); // 00002
radio.openReadingPipe(1, addresses[0]); // 00001
radio.setPALevel(RF24_PA_MIN);
if (!disp1.begin(SSD1306_SWITCHCAPVCC, 0x3C)) { // Large Display Check & Initialize
Serial.println(“Failed to initialize Large Display”);
for(;;);
}
if (!disp2.begin(SSD1306_SWITCHCAPVCC, 0x3D)) { // Small Display Check & Initialize
Serial.println(“Failed to initialize Small Display”);
for(;;);
}
if (! mpu.begin()) { // MPU 6050 Check & Initialize
Serial.println(“Failed to initialize MPU6050 chip”);
for(;;);
}
mpu.setAccelerometerRange(MPU6050_RANGE_8_G);
mpu.setGyroRange(MPU6050_RANGE_500_DEG);
mpu.setFilterBandwidth(MPU6050_BAND_21_HZ);
disp1.clearDisplay(); //Clear Initial Buffers
disp2.clearDisplay();
disp1.setTextSize(1);
disp1.setTextColor(WHITE);
disp1.setCursor(42, 0);
disp1.println(“Booting”);
disp1.display();
disp2.display();
delay(2000);
if(analogRead(A5) >= 5){
while(analogRead(A5) >= 2){
disp1.clearDisplay();
disp1.setTextColor(WHITE);
disp1.setCursor(35, 0);
disp1.println(“! Warning !”);
disp1.setCursor(15, 20);
disp1.println(“Throttle not Zero”);
disp1.display();
delay(50);
}
}
}
sensors_event_t a, g, temp; // Gyro Variables
int flag = 0; // To zero out gyro
float x_cor= 0, y_cor= 0; // Correction Values
void loop(){
if(digitalRead(5) == digitalRead(6)){
calc_0();
delay(25);
radio.stopListening();
radio.write(&data, sizeof(data));
// delay(25);
// radio.startListening();
// if (radio.available()) {
// while (radio.available()){
// radio.read(&stat, sizeof(stat));
// }
// }
selector_screen();
flag=0;
}
else if(digitalRead(5) == 0){
calc_1();
delay(25);
radio.stopListening();
radio.write(&data, sizeof(data));
// delay(25);
// radio.startListening();
// if (radio.available()) {
// while (radio.available()){
// radio.read(&stat, sizeof(stat));
// }
// }
//serial_debug();
screen_1();
flag=0;
}
else if(digitalRead(6) == 0){
while (flag == 0 && digitalRead(6) == 0){
zero_out();
}
if(flag == 1){
mpu.getEvent(&a, &g, &temp);
calc_2();
delay(25);
radio.stopListening();
radio.write(&data, sizeof(data));
// delay(25);
// radio.startListening();
// if (radio.available()) {
// while (radio.available()){
// radio.read(&stat, sizeof(stat));
// }
// }
serial_debug();
screen_2();
}
}
}
void selector_screen(){
disp1.clearDisplay();
disp1.setTextSize(1);
disp1.setTextColor(WHITE);
disp1.setCursor(10, 0);
disp1.println(“Select Mode”);
disp1.setCursor(10, 10);
disp1.println(“Up for Manual”);
disp1.setCursor(10, 20);
disp1.println(“Down for Gyro”);
disp1.display();
disp2.clearDisplay();
disp2.setTextSize(2);
disp2.setTextColor(WHITE);
disp2.setCursor(5, 0);
disp2.cp437(true);
disp2.write(24);
disp2.display();
}
void screen_1(){
disp1.clearDisplay();
disp1.setTextSize(1);
disp1.setTextColor(WHITE);
disp1.setCursor(32, 0);
disp1.println(“Manual Mode”);
disp1.display();
disp2.clearDisplay();
disp2.display();
}
void screen_2(){
disp1.clearDisplay();
disp1.setTextSize(1);
disp1.setTextColor(WHITE);
disp1.setCursor(40, 0);
disp1.println(“Gyro Mode”);
disp1.display();
disp2.clearDisplay();
disp2.setTextSize(1);
disp2.setTextColor(WHITE);
disp2.setCursor(5, 0);
disp2.println(“X = “);
disp2.setCursor(25, 0);
disp2.println(a.acceleration.x + x_cor);
disp2.setCursor(5, 10);
disp2.println(“Y = “);
disp2.setCursor(25, 10);
disp2.println(a.acceleration.y + y_cor);
disp2.display();
}
void zero_out(){
disp1.clearDisplay();
disp1.setTextSize(1);
disp1.setTextColor(WHITE);
disp1.setCursor(40, 0);
disp1.println(“Gyro Mode”);
disp1.setCursor(5, 20);
disp1.println(“Press JSW when ready”);
disp1.display();
mpu.getEvent(&a, &g, &temp);
x_cor = 0 – a.acceleration.x;
y_cor = 0 – a.acceleration.y;
if(digitalRead(4) == 0){
flag=1;
}
}
void calc_0(){
data.spot = 0;
data.x = analogRead(A0);
data.y = analogRead(A1);
data.jsw = digitalRead(4);
data.trim = analogRead(A2);
}
void calc_1(){
data.spot = analogRead(A5);
data.x = analogRead(A0);
data.y = analogRead(A1);
data.jsw = digitalRead(4);
data.trim = analogRead(A2);
}
void calc_2(){
data.spot = analogRead(A5);
if(a.acceleration.x + x_cor >= -5 && a.acceleration.x + x_cor <= 5){
data.y = map(a.acceleration.x + x_cor, -5, 5, 800, 200);
}
else if(a.acceleration.x + x_cor < -5){
data.y = 800;
}
else if(a.acceleration.x + x_cor > 5){
data.y = 200;
}
if(a.acceleration.y + y_cor >= -8 && a.acceleration.y + y_cor <= 8){
data.x = map(a.acceleration.y + y_cor, -8, 8, 1023, 0);
}
else if(a.acceleration.y + y_cor < -8){
data.x = 1023;
}
else if(a.acceleration.y + y_cor > 8){
data.x = 0;
}
data.jsw = digitalRead(4);
data.trim = analogRead(A2);
}
void serial_debug(){
Serial.print(data.spot);
Serial.print(” “);
Serial.print(data.x);
Serial.print(” “);
Serial.print(data.y);
Serial.print(” “);
Serial.print(data.jsw);
Serial.print(” “);
Serial.print(data.trim);
Serial.print(” “);
Serial.print(stat.batt);
Serial.println(” “);
}
Working of Project-
The RC Transmitter project is based on Arduino Micro and is designed to transmit multiple control signals wirelessly using the NRF24L01 RF module. The system reads inputs from various control devices and sends the processed data to a receiver unit for real-time control.









Add comment